Microcontroladores PIC en Lenguaje C – II
Acerca de este curso
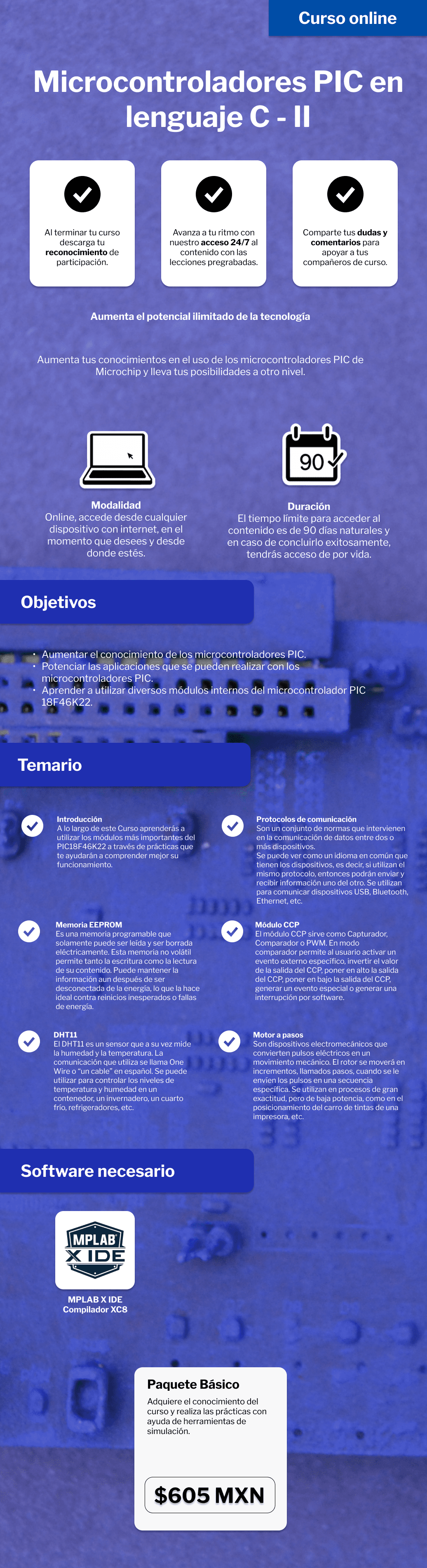
Contenido del curso
Introducción al curso
-
Bienvenida
00:00 -
PIC 18F46K22
01:35 -
Configuración de fusibles
01:57 -
Actualización de PICkit 2
01:31 -
Cargar .hex a Miuva 18
01:04 -
Práctica #1: Parpadeo de LED (Diagrama de flujo)
00:49 -
Práctica #1: Parpadero de LED (Código)
02:27
1. Protocolos de comunicación
2. Memoria EEPROM
3. Módulo CCP
4. Sensor de humedad DHT11
5. Control de motor a pasos
Banco de ejercicios
Valoraciones y reseñas de estudiantes

Aún no hay reseñas.